การใช้งาน STEP 7 ร่วมกับ SPS VISU
การใช้งาน STEP 7 ร่วมกับ SPS VIS U.
เขียนและเรียบเรียงโดย อ.จักรินทร์ เกตุโต
เขียนและเรียบเรียงโดย อ.จักรินทร์ เกตุโต
เราจะต้องใช้โปรแกรมเพื่อจำลองการทำงานของมอเตอร์ก่อนเพื่อตรวจสอบการทำงานของโปรแกรมก่อนนำไปใช้จริง
เราจึงต้องใช้โปรแกรม SPS
VISU ซึ่งเป็นโปรแกรมจำลองการทำงานของอุปกรณ์ในวงจร PLC โดยโปรแกรมนี้ สามารถออกแบบ
สายพาน (Bell
 เลือก
คลิก ที่ Icon SPS-VISU
เลือก
คลิก ที่ Icon SPS-VISU
เปิดโปรแกรม SPS-VISU ขึ้นมาเพื่อทำงานออกแบบวงจรมอเตอร์ไฟฟ้า (หรืออื่นๆ) จากเมนู Object
ข้างล่างนี้ แล้วทำการ Download DATA Files จาก
โปรแกรม S7-300 เข้าสูโปรแกรม SPS-VISU แล้ว RUN

การ
Download
โปรแกรม PLC S7-300

โดยการเปิดเมนู Software-SPS
à Software-SPS steuern
à คลิก

จากข้างต้นจะเปิดหน้าต่างนี้
ออกมา à กดปุ่ม S7P laden เพื่อเปิดโปรแกรม S7-300

เลือก File
Program จาก Program S7-300
คลิก Open เพื่อเปิดใช้โปรแกรม
กลับไปกดปุ่ม START
อีกครั้ง
กดปุ่ม OK
กดปุ่ม RUN
เท่านี้ โปรแกรม SPS-Visu กับ S7-300 ก็จะสามารถทำงานด้วยกันแสดงการทำงานแบบจำลองได้ทันที

จากภาพ
โปรแกรม
SPS-Visu ด้านบน แสดงภาพเมื่อกดปุม RUN บนแผงปุ่ม
Object แล้ว โปรแกรม S7-300 ก็จะควบคุมการทำงานของอุปกรณ์ต่างๆของ
โปรแกรม SPS-Visu
ขั้นตอนการทำงานของโปรแกรม
PLC
S7-300 กับ SPS-Visu
เมื่อกดปุ่ม Start (I0.0) ปุ่มนี้จะตั้งค่าให้ตรงกับ Contact I0.0 ของ PLC
สั่งงานให้ I0.0 ใน PLC S7-300 ทำงาน ทำให้ Coil Q0.0 ทำงาน
และสั่งงานกลับมาที่โปรแกรม SPS-Visu เพื่อแสดงผลในรูปแบบของรูปมอเตอร์หมุน
ตามเข็มนาฬิกา
ผู้อ่านจะต้องสามารถออกแบบระบบควบคุมมอเตอร์ไฟฟ้าด้วยวงจรไฟฟ้าได้และสามารถต่อวงจรทำงานได้อย่างถูกต้อง
โดยเลื่อกใชวัสดุอุปกรณที่ถูกต้อง ทั้งกระแสและแรงดันไฟฟ้าที่รองรับระบบได้
การออกแบบระบบควบคุมด้วย โปรแกรม PLC นั้นยังจำเป็นที่จะต้องใช้งาน
Magnatic Contactor ร่วมด้วย แต่ไม่จำเป็นที่จะต้องใช้ Timer
และ Counter ซึ่งใน PLC สามารถเลือกใช้งานได้จำนวนมาก
วงจรที่ออกแบบด้วย PLC เป็นวงจรไฟฟ้าแรงต่ำ
24Vdc ควบคุมผ่าน Contactor หรือ Relay
ขึ้นอยู่กับกระแสและแรงดันของอุปกรณ์ทางด้าน Output ที่ใช้งาน
จากคำอธิบายข้างต้น
ทดลองออกแบบวงจรควบคุมมอเตอร์แบบ Direct Start หรือ สตาร์ทตรง
ด้วย PLC โดยให้วงจรกำลังควบคุมมอเตอร์ 3 เฟสขนาด 1.5 HP ตามรูป

การออกแบบนั้นให้คงวงจรกำลังไว้อย่างเดิม
ให้เปลี่ยนแบบวงจรควบคุมเท่านั้น โดยการคิดแบบง่ายๆ โดยเบื้องต้น
ให้เรามองวงจรควบคุม ในแบบที่พลิกนอนลง ดังรูป

แล้วเขียนให้อยู่ในรูปแบบของภาษา LADDER ดังรูปนี้

แต่ใน
Program PLC S7-300 ไม่สามารถใช้คำแทน Input และ Output เป็นอย่างอื่นได้ นอกจาก I แทน Input และ Q แทน Output
จึงเขียนใหม่ ได้ ดังรูปนี้ และเปรียบเทียบกับรูปวงจรเดิม

เพียงเท่านี้ เราก็สามารถเขียนวงจรการควบคุมมอเตอร์แบบสตาร์ทตรงได้แล้ว
ขั้นตอนต่อไป ให้ออกแบบรูปวงจรการติดตั้งวงจรควบคุม ร่วมกับ PLC โดย นำอุปกรณ์ Pushbutton
Switch , Circuit breaker มาต่อวงจรด้าน
Input และ Magnatic Contactor ต่อวงจรเข้าด้าน
Output ดังรูป

จากรูปด้านบน
เราสามารถต่อวงจรตามรูปได้และสามารถสั่งงานให้มอเตอร์หมุนทำงานได้ตามเงื่อนไข
แต่มีข้อสังเกต ดังนี้
1. Contact ของ Fuse (F2, F3) และ PushbuttonSwitc (S1) เป็นแบบ ปกติปิด (Normally Close) ในวงจรไฟฟ้า
แต่ในวงจร PLC เป็นปกติเปิด (Normally Open)
ให้เราพิจารณา
ดังนี้ ในวงจรไฟฟ้า ไม่ว่า Contact ของอุปกรณ์ต่างๆ
จะเป็นแบบใด (NO หรือ
NC) แต่ในการนำอุปกรณ์จริงมาต่อเข้า PLC จะต้องให้ Contact ทั้งหมดเป็นแบบปกติเปิดเท่านั้น (Normal
และให้เขียนโปรแกรม PLC ด้วยภาษา LAD โดยมี Input และ Output ตามที่ต่อวงจรไฟฟ้าจริง
ปกติปิดในวงจรจริง ก็ใหเขียนโปรแกรมเป็น ปกติปิดด้วย ( --]/[--)
2. Coil ของ
Magnatic Contactor ( K ) จะต้องเป็น Coil ที่รองรับแรงดันไฟฟ้า 24V เท่านั้น หรือควบคุมผ่าน Relay
24V อีกชุดก็ได้
การออกแบบวงจรควบคุมมมอเตอร์ไฟฟ้าด้วยโปรแกรม
PLC
แบบ Jogging

จากรูปภาพแสดงการควบคุมมอเตอร์
ให้ออกแบบวงจรควบคุมมอเตอร์แบบ Jogging
จากที่เราเคยฝึกต่อวงจรควบคุมมอเตอร์ไฟฟ้าด้วยคอนแทรกเตอร์วงจร
Jogging ไปแล้วนั้น ให้นำรูปแบบวงจรควบคุม
เดิมมาเขียนใหม่เป็นวงจรควบคุมด้วย PLC ดังรูป

1.
ขั้นตอนที่ 1 นำวงจรควบคุมมอเตอร์ไฟฟ้าแบบ Joggimg มาหมุนให้นอนลง

2.
ขั้นตอนที่ 2
กำหนดค่า Address ให้กับวงจร แทน สัญลักษณ์ Fuse
และ Pushbutton Switch
INPUT OUTPUT
F1 แทนด้วย I0.0 K1 แทนด้วย Q4.0
F2 แทนด้วย I0.1 K2 แทนด้วย Q4.1
S1 แทนด้วย I0.2
S2 แทนด้วย I0.3
S3 แทนด้วย I0.4
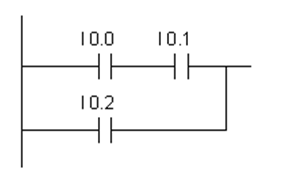
3. ขั้นตอนที่ 3 เขียนวงจรให้เป็นในรูปแบบของ
LADDER Diagram.

4. ขั้นตอนที่ 4
เปลี่ยน Simbol
กำหนดตัวแปรของ Fuse, Pushbutton และ Magnatic
Contactor เป็น Address

5. ขั้นตอนที่
5 โหลดโปรแกรม PLC S7-300 เข้าไปในโปรแกรม SPS-Visu และกด RUN เพื่อตรวจสอบการทำงาน ถ้าทำงานไม่ไดตามเงื่อนไขที่กำหนด
ให้ตรวจสอบ และแก้ไขโปรแกรมใหม่แล้วโหดเพื่อตรวจสอบอีกครั้ง ...
จนกว่าจะได้ตามเงื่อนไข แล้วจึงโหลดเข้า PLC Hardwar
6. ขั้นตอนที่ 6 เมื่อทดลองโปรแกรมสมบูรณ์แล้ว
ให้ ต่อวงจรอุปกรณ์ Input และ Output เข้ากับเครื่อง
PLC Hardware ตามรูป แล้ว Download โปรแกรม
จาก S7-300 ลงใน PLC Hardwar e
กด RUN ที่ Hardwar

การออกแบบวงจรควบคุมมมอเตอร์ไฟฟ้าด้วยโปรแกรม
PLC
แบบ Reversing after Stop

จากรูปภาพแสดงการควบคุมมอเตอร์
ให้ออกแบบวงจรควบคุมมอเตอร์แบบ Reversing after Stop
จากที่เราเคยฝึกต่อวงจรควบคุมมอเตอร์ไฟฟ้าด้วยคอนแทรกเตอร์วงจร
Reversing
after Stop
ไปแล้วนั้น ให้เรานำรูปแบบวงจรควบคุมแบบเดิม
มาออกแบบใหม่เป็นวงจรควบคุมด้วย PLC ดังรูป

ขั้นตอนที่
1 เหมือนวงจรข้างต้น ให้นำวงจรควบคุมมอเตอร์ไฟฟ้าแบบ Reversing after Stop มาหมุนให้นอนลง

ขั้นตอนที่
2 กำหนดค่า Address ให้กับวงจร แทน สัญลักษณ์ Fuse
และ Pushbutton Switch
INPUT OUTPUT
F1 แทนด้วย I0.0 K1 แทนด้วย Q4.0
F2 แทนด้วย I0.1 K2 แทนด้วย Q4.1
S1 แทนด้วย I0.2 H1 แทนด้วย Q4.2
S2 แทนด้วย I0.3 H2 แทนด้วย Q4.3
S3 แทนด้วย I0.4 H3 แทนด้วย Q4.4
ขั้นตอนที่ 3
เขียนวงจรให้เป็นในรูปแบบของ LADDER Diagram.

ขั้นตอนที่ 4 เปลี่ยน
Simbol กำหนดตัวแปรของ Fuse, Pushbutton และ Magnatic
Contactor เป็น Address

ขั้นตอนที่ 5 โหลดโปรแกรม
PLC
S7-300 เข้าไปในโปรแกรม SPS-Visu และกด RUN
เพื่อตรวจสอบการทำงาน ถ้าทำงานไม่ไดตามเงื่อนไขที่กำหนด ให้ตรวจสอบ
และแก้ไขโปรแกรมใหม่แล้วโหดเพื่อตรวจสอบอีกครั้ง ... จนกว่าจะได้ตามเงื่อนไข
แล้วจึงโหลดเข้า PLC Hardwar
ขั้นตอนที่ 6 เมื่อทดลองโปรแกรมสมบูรณ์แล้ว
ให้ ต่อวงจรอุปกรณ์ Input
และ Output เข้ากับเครื่อง PLC
Hardware ตามรูป แล้ว Download โปรแกรม จาก S7-300
ลงใน PLC Hardwar e กด RUN ที่ Hardwar

การออกแบบวงจรควบคุมมมอเตอร์ไฟฟ้าด้วยโปรแกรม
PLC
แบบ Direct Reversing (Plugging)

จากรูปภาพแสดงการควบคุมมอเตอร์
ให้ออกแบบวงจรควบคุมมอเตอร์แบบ Direct Reversing (Plugging)
จากที่เคยฝึกต่อวงจรควบคุมมอเตอร์ไฟฟ้าด้วยคอนแทรกเตอร์วงจร
Direct
Reversing (Plugging)
ไปแล้วนั้น ให้นำรูปแบบวงจรควบคุมแบบเดิม
มาออกแบบใหม่เป็นวงจรควบคุมด้วย PLC ดังรูป

ขั้นตอนที่
1 เหมือนวงจรข้างต้น ให้นำวงจรควบคุมมอเตอร์ไฟฟ้าแบบ Direct Reversing
(Plugging)
มาหมุนให้นอนลง

ขั้นตอนที่
2 กำหนดค่า Address ให้กับวงจร แทน สัญลักษณ์ Fuse
และ Pushbutton Switch
INPUT OUTPUT
F1 แทนด้วย I0.0 K1 แทนด้วย Q4.0
F2 แทนด้วย I0.1 K2 แทนด้วย Q4.1
S1 แทนด้วย I0.2
S2 แทนด้วย I0.3
S3 แทนด้วย I0.4
ขั้นตอนที่ 3
เขียนวงจรให้เป็นในรูปแบบของ LADDER Diagram.

ขั้นตอนที่ 4 เปลี่ยน
Simbol กำหนดตัวแปรของ Fuse, Pushbutton และ Magnatic
Contactor เป็น Address

ขั้นตอนที่ 5 โหลดโปรแกรม
PLC
S7-300 เข้าไปในโปรแกรม SPS-Visu และกด RUN
เพื่อตรวจสอบการทำงาน ถ้าทำงานไม่ไดตามเงื่อนไขที่กำหนด ให้ตรวจสอบ
และแก้ไขโปรแกรมใหม่แล้วโหดเพื่อตรวจสอบอีกครั้ง ... จนกว่าจะได้ตามเงื่อนไข
แล้วจึงโหลดเข้า PLC Hardwar
ขั้นตอนที่ 6 เมื่อทดลองโปรแกรมสมบูรณ์แล้ว
ให้ ต่อวงจรอุปกรณ์ Input
และ Output เข้ากับเครื่อง PLC
Hardware ตามรูป แล้ว Download โปรแกรม จาก S7-300
ลงใน PLC Hardwar e กด RUN ที่ Hardwar

.
.
.
.


ความคิดเห็น